Bluetooth Power Modes
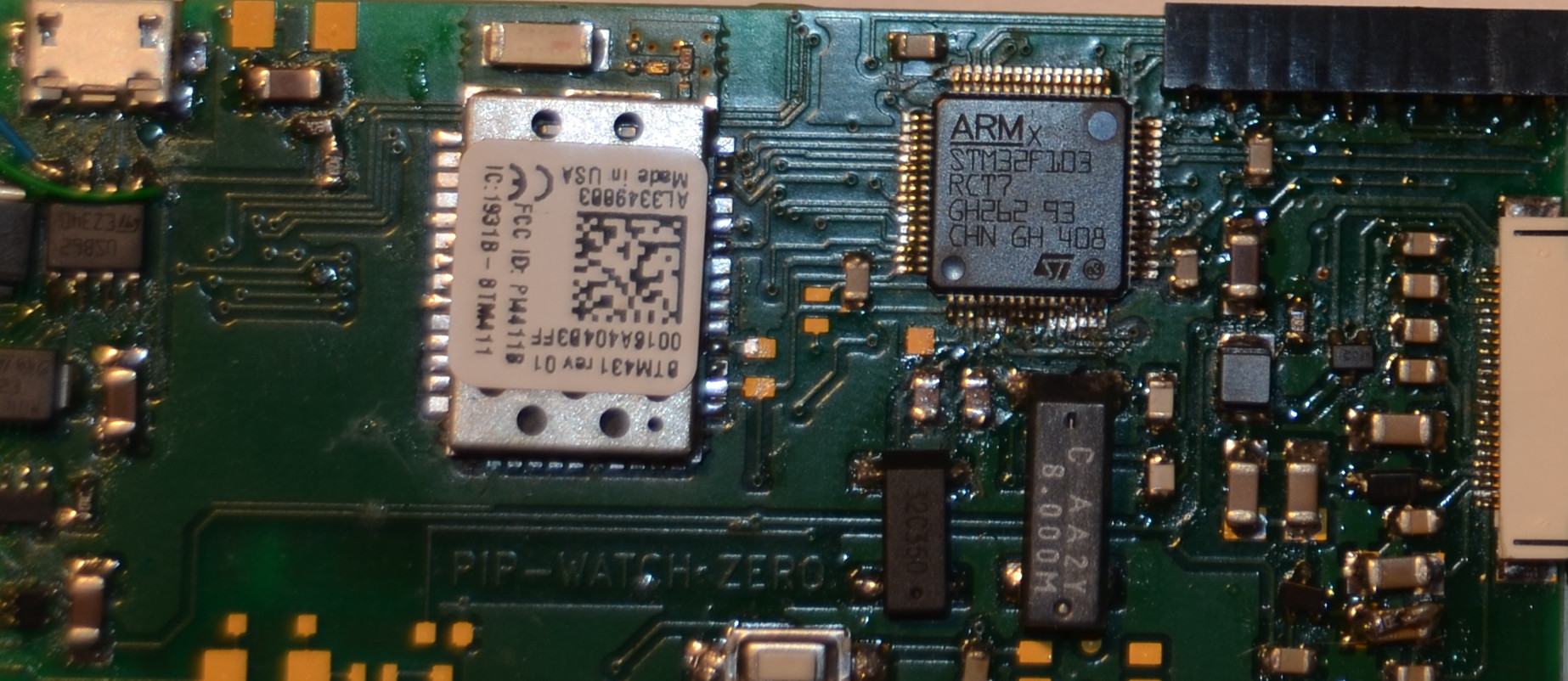
In previous post we discussed CPU power consumption in PIP-Watch. Today we look into Bluetooth power consumption because it is significant as much as the CPU power.
In previous post we discussed CPU power consumption in PIP-Watch. Today we look into Bluetooth power consumption because it is significant as much as the CPU power.
Processor Power The PIP-Watch is a battery-powered device that will be continuously on, hence the average power consumption is one of the most important engineering aspects. In this post I will go through two simple steps of optimizing CPU power… Continue Reading
The printed circuit boards for PIP-Watch Zero came from Pragoboard fab on Friday 12 Sept. I ordered three pieces because the cost is practically identical as for two or one. On Saturday I assembled one board, and on Sunday I… Continue Reading
Schematic [PDF], BOM, and PCB layout for my PIP-Watch “Zero” was completed during this week. Layout data was sent to a local PCB fab – pragoboard.cz. The board should be ready and shipped during the next week. The PCB is… Continue Reading
In my previous homebrew projects I did not use any operating system in the embedded processors. Software was programmed on a bare-metal hardware. In my Talking Clock project I created a simple cooperative event-processing abstraction layer, but it was very… Continue Reading
GDE021A1 is a graphics display with a resolution 172×72 pixels, each pixel is 2 bits deep (4 shades of grey). The display has an internal controller SSD1606 with a framebuffer. The framebuffer size is 172*72*2/8=3096 Bytes. When the display is… Continue Reading
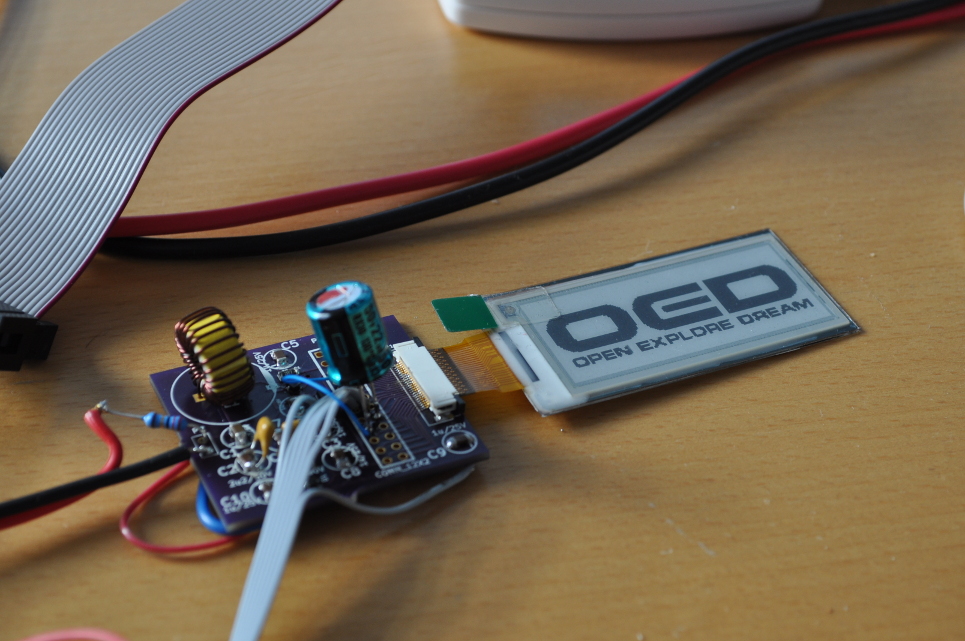
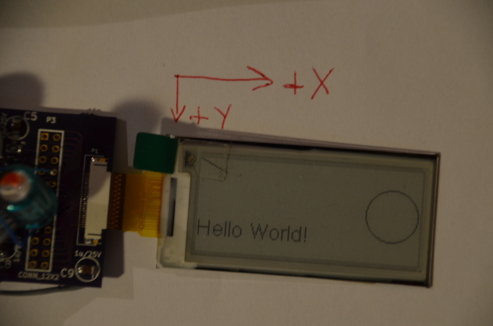
Today I have managed to get the GDE021A1 ePaper display (EPD) working! I used my minimal EPD-Driver board, which implements a flat-flex cable connector and a booster circuit for the display. The booster generates high voltages needed for display operation… Continue Reading
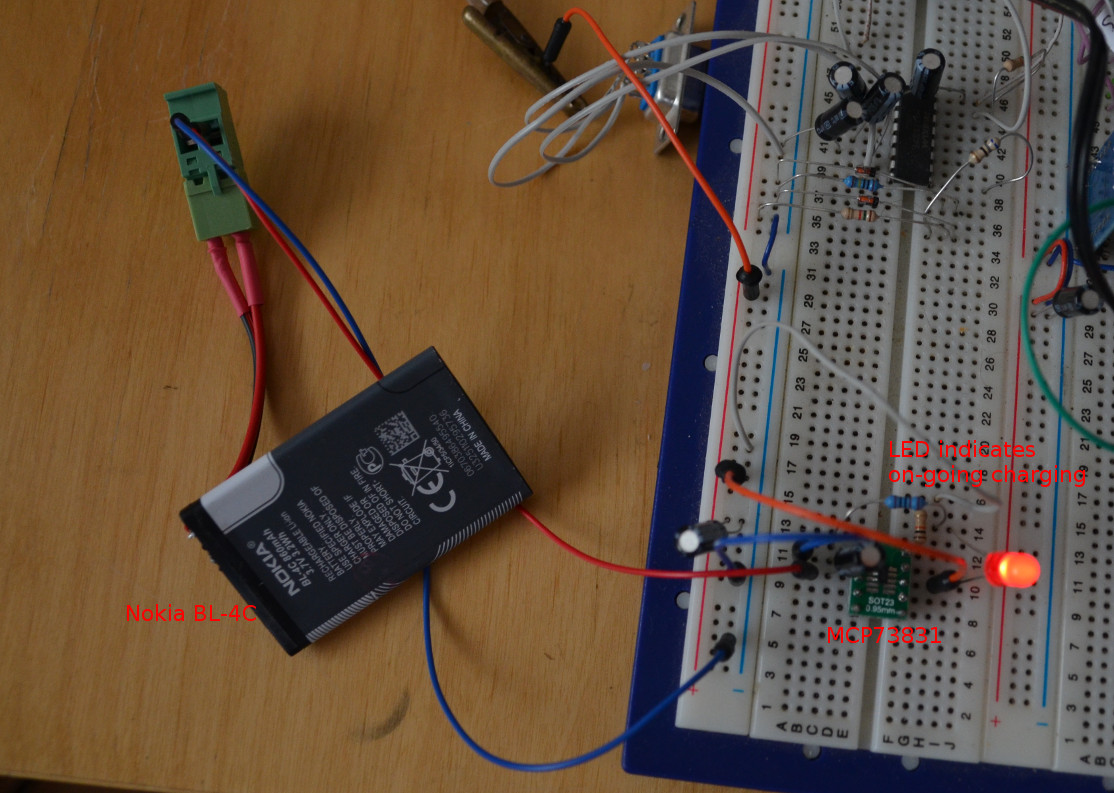
In my PIP-Watch project I will use a Li-On battery to provide power. Li-On batteries are easy to use in hobby projects: they are light, small, with high capacity, and they come in variety of sizes. Most (not all) Li-On… Continue Reading
Today I tried pairing my UART-to-Bluetooth adapter to a Nexus 7 tablet to see how it works. On the tablet I used BlueTerm, an open-source terminal emulator for communicating with any serial device using a bluetooth serial adapter. I connected… Continue Reading
Mechanical drawing of my EPD ePaper display GDE021A1 is shown below. Signals to the display are connected via a 24-pin flex flat cable. The pitch between pins is only 0.5mm. A suitable matching connector is MOLEX 52435-2471 FPC RCPT 24PIN… Continue Reading