OpenX65 part-way assembled

Since the first post a lot of happened:
Since the first post a lot of happened:
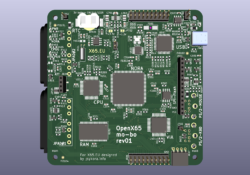
I am starting a new hobby project called X65: I intend to create an open-source computer based on the “vintage” 6502 processor, which is still in production as the W65C02. The original 6502 was used in many home personal computers… Continue Reading
Mywayback is a complete rewrite of my previous timeback archival tool. It is now available on the github: https://github.com/jsyk/mywayback Main features: Python 3.x in Windows (with NTFS-only) and Linux. Requires the package sortedcontainers. Automatic deduplication of source files using SHA256… Continue Reading
Engineers’ Tribute is an endless well of electronic technology sites, perfectly suited for studying during long winter evenings (or lockdowns.. 🙂 ) Checkout this handy wire-gauge chart made by PEI-Genesis. The download link is right at their front page:

Bad sleep last night brought me ideas, and since we’ve got a situation down here in Siemens, the topic was not unexpected: CRISIS STARTSAS UBER FALLS. and NO CORRECTIONBEFORE TRUMP’SRE-ELECTION. Let time travelers from 2020 and beyond let us know… Continue Reading

The Vacuum Tube Watch project is now released in version V2.1 “EVERGLOW”. Go see it via the “Projects” menu above. Enjoy!
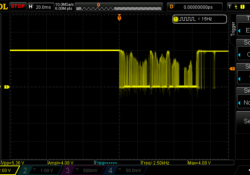
UPDI – Unified Program and Debug Interface – is the new programming and debugging interface on new ATtiny MCUs from Microchip. The UPDI requires just a single pin on the MCU, so it is very suitable for low-pin count chips.… Continue Reading

I created a smal 100x100mm PCB mini-panel of some of the SMT breakout boards from Adafruit. Each mini-panel contains: 3x SOIC-20 (A-side) and TSSOP-20 (B-side) 5x SOIC-16 (A-side) and TSSOP-16 (B-side) 5x SOIC-8 (A-side) and MSOP-8 (B-side) 4x SOIC-8 (A-side)… Continue Reading

Here you can find documentation about my DIY Analog Curve Tracer.
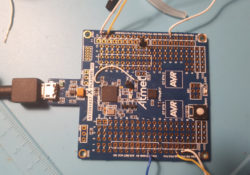
New AVR processors from Microchip/Atmel use a 1-wire UPDI interface for flash programming. You could use either AVR ICE or Pickit 4 as the “official” programmers (I did not test any of them). Both of these cost >50 EUR. A… Continue Reading